
![]()
MATEMATICA
I Numeri complessi I Numeri Immaginari I numeri Relativi I Numeri Naturali I Numeri Reali
Ripasso di matematica Aritmetica e numeri
Aritmetica Geometria Informatica
Geometria Piana e Solida Informatica Media Ecdl
GEOMETRIA PIANA E SOLIDA
Elementi Fondamentali della Geometria Gli Angoli Il Triangolo Il Cerchio Linee sul Piano Quadrilateri e Poligoni Superficie dei Poligoni Cilindri e Prismi Coni e Piramidi Gli Esaedri La Sfera Geometria Solida Nozioni Generali Solidi di Rotazione
![]()
![]()
Dizionario di matematica e geometria iniziale G
G
GEOMETRIA
La geometria euclidea è la geometria che si basa sui postulati di Euclide e in particolar modo sul postulato delle parallele, secondo il quale due rette parallele non si intersecano mai.I cinque postulati
Di seguito si riportano i postulati di Euclide:- Tra due segni (punti) qualsiasi è possibile tracciare una ed una sola retta.
- Si può prolungare una retta oltre i due segni indefinitamente.
- Dato un segno e una lunghezza, è possibile descrivere un cerchio.
- Tutti gli angoli retti sono uguali.
- Se una retta che taglia due rette determina dallo stesso lato angoli interni minori di due angoli retti, prolungando le due rette, esse si incontreranno dalla parte dove i due angoli sono minori di due retti.
Geometrie non euclidee
Sono dette geometrie non euclidee tutte le geometrie costruite negando o non accettando alcuni postulati euclidei.Il V postulato di Euclide, detto postulato delle parallele è il postulato che nel corso dei secoli ha suscitato il maggior interesse. La caratteristica che contraddistingue i postulati e gli assiomi della geometria di Euclide è l'essere asserzioni la cui verità è garantita dall'evidenza. L'evidenza è una caratteristica dei primi quattro postulati degli Elementi basta infatti usare riga e compasso; inoltre essi restano validi se ci si limita ad una porzione finita di piano.
Il postulato delle parallele non è 'evidentemente vero', infatti non rimanda ad alcuna costruzione geometrica che possa limitarsi sempre ad una porzione finita di piano. Pare che lo stesso Euclide non fosse convinto dell'evidenza del postulato e questo è dimostrato dall'uso limitato che ne ha fatto nelle dimostrazioni dei teoremi della sua geometria. Negli oltre duemila anni successivi alla diffusione degli elementi di Euclide, molti sono stati i tentativi di dimostrare il V postulato o di riformularlo o, addirittura, di sostituirlo con altri equivalenti. Purtroppo tali tentativi sono tutti falliti, perché tutti i ragionamenti riconducevano sempre all'uso del V postulato.
Nei primi decenni del XIX secolo, il fallimento di tutti i tentativi effettuati aveva convinto i matematici dell'impossibilità di dimostrare il V postulato. È da questo momento che inizia a farsi strada l'idea di costruire altre geometrie che facciano a meno del V postulato. Nascono così i primi modelli di geometria non euclidea quali per esempio la geometria iperbolica o la geometria ellittica.
Storia delle geometrie non euclidee
Tentativi di dimostrazione del quinto postulato
Nei secoli, i tentativi di dimostrare il postulato sono numerosi: Proclo nel suo Commento al Primo Libro degli Elementi di Euclide ci riferisce delle "dimostrazioni" di Posidonio e Tolomeo, proponendone poi una sua. Altri tentativi furono compiuti dai matematici arabi, tra cui Nasir ad-Din at-Tusi che mette in relazione il quinto postulato con la somma degli angoli interni di un triangolo. In ognuno di questi tentativi di dimostrazione, e nei successivi, viene implicitamente dato per vero un assioma equivalente a quello delle parallele, rendendo vana la dimostrazione. Anche modificando la definizione di rette parallele non si approda a nulla: Euclide le definisce "due rette che non s'incontrano mai", per Posidonio, secondo Proclo, esse sono "due rette equidistanti, ossia in cui i punti della seconda siano tutti alla stessa distanza dai corrispettivi della prima". Quest'ultima affermazione non dimostra nulla: non è detto che il luogo dei punti equidistanti da una retta sia una retta. Accettarlo in via di principio equivale ad assumere come valido il quinto postulato, e ci si ritrova da capo.Dimostrazione per assurdo
Frustrati dagli insuccessi ottenuti cercando una dimostrazione diretta del postulato, gli studiosi provano ad assumere per validi i primi quattro postulati e creare delle geometrie alternative, sperando di arrivare ad una contraddizione. Questo avrebbe dimostrato che il quinto postulato deve necessariamente essere vero. Uno dei maggiori esponenti di questa scuola fu Giovanni Gerolamo Saccheri, che nel 1733 credendo di esservi riuscito, pubblica Euclides ab omni naevo vindicatus. Anche se difettosa, e passata sotto silenzio, la dimostrazione per assurdo di Saccheri indicò la strada per la creazione di geometrie non-euclidee, nella speranza di portarle ad una contraddizione. Opera questa in cui si impegnarono molti uomini di scienza tra il XVIII e il XIX secolo. Pochi però erano matematici di rilievo: Gauss, che non pubblicò mai nulla sull'argomento per timore delle strida dei beoti, Lagrange e Legendre costituiscono delle fulgide eccezioni. In effetti, Roberto Bonola, nel suo volume La geometria non euclidea, pubblicato da Zanichelli nel 1906, si trovò a dover inserire nei capitoli storici molti "dilettanti" tra i fondatori della geometria non euclidea: Janos Bolyai era un militare, Ferdinando Schweikart era un avvocato, e via di questo passo. Bolyai, inoltre, era figlio di un amico di Gauss, Farkas: dopo aver ricevuto l'opera di Janos nel gennaio 1832, Gauss scrisse a Farkas dicendo:Se inizio dicendo che non posso lodare quest'opera, tu resterai meravigliato per un istante. Ma non posso fare altrimenti, lodarlo sarebbe infatti lodare me stesso; tutto il contenuto dell'opera spianata da tuo figlio coincide quasi interamente con quanto occupa le mie meditazioni da trentacinque anni a questa parte [...] È dunque con gradevola sorpresa che mi viene risparmiata questa fatica [di pubblicare], e sono contento che il figlio di un vecchio amico mi abbia preceduto in modo così notevole.
È di rilievo notare che i risultati della geometria "astrale", come Gauss chiamava la geometria iperbolica, erano in stridente contrasto con la filosofia kantiana, in quanto questa assumeva come giudizio sintetico a priori la geometria euclidea.
![]()
![]()
Geometria piana
Per geometria piana si intende quel ramo della geometria orientato, appunto, al piano.Definizioni
Il piano è determinato da due dimensioni denominate x e y. L'unità fondamentale è il punto che non ha dimensione]. Si definiscono- "retta" quella linea immaginaria che non ha né punto di orgine né punto di fine (è infinita);
- "semiretta" quella porzione di retta che ha un solo punto di origine;
- "segmento" un tratto di retta delimitato da due punti.
Geometria significa misurazione. Ciò vuol dire che nell'ambito geometrico non si fa altro che calcolare misure tra formule e problemi.
Proprietà
- Per un punto possono passare infinite rette.
- Per ogni retta possono esistere infinite parallele.
Le unità di misura utilizzate per procedere ai calcoli necessari, devono essere stabilite e rispettate.
La geometria, pertanto, a mezzo di leggi e di formule, permette all'uomo di progettare e misurare.
Sul piano possono essere tracciate le più disparate forme geometriche (figure) delle quali però, a mezzo di formule, si possono conoscere esattamente le ampiezze, denominate aree o superfici.
Le figure geometriche sono delimitate da segmenti (lati) che, in base alla presenza o no di parallelismo e di inclinazione tra di loro, conferiscono alle stesse forme diverse e conseguenti nomi diversi.
Principali figure geometriche
Nella geometria piana sono presenti diverse figure, identificate in base agli angoli e ai lati.- Il quadrato (4 lati uguali formanti tra loro angoli retti - 90°)
- Il rettangolo (4 lati, uguali a due a due, formanti angoli retti)
- Il triangolo (tre lati, formanti angoli dai valori più disparati); può essere denominato, in base alla lunghezza dei lati: equilatero (tre lati uguali), isoscele (due lati uguali) e scaleno (tre lati diversi)
- Il rombo (4 lati uguali formanti angoli diversi, a due a due)
- Il romboide (4 lati, uguali a due a due, formanti angoli uguali a due a due)
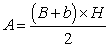
- Il trapezio (4 lati, 2 di misure diverse, paralleli, e 2 inclinati che congiungono i primi due; i due lati paralleli sono chiamati basi[minore e maggiore]
- l'altezza del trapezio è data dalla distanza, tra loro, dei due lati paralleli; può essere rettangolo, quando a congiungere i 2 lati diversi e paralleli vi siano un lato inclinato ed uno verticale
- isoscele quando i due lati inclinati hanno la stessa lunghezza
- scaleno quando i due lati inclinati hanno lunghezze diverse).
- Il cerchio, composto da un segmento (circonferenza) che ha gli estremi a contatto e ogni punto di questo equidistante da un punto comune chiamato centro [ogni segmento che unisce il centro ad un qualsiasi punto della circonferenza è chiamato "raggio"; il segmento che unisce due punti della circonferenza, passando per il centro, è chiamato "diametro", pari perciò al doppio del raggio; il segmento che unisce due punti della circonferenza, senza passare per il centro è chiamato "corda"; il diametro è, pertanto, la corda massima].
Superfici delle figure geometriche
Ogni figura geometrica delimita una porzione (superficie) del piano sul quale insiste, sia esso un terreno o un foglio da disegno o quant'altro possa essere utilizzato per rappresentarvi porzioni necessarie a qualsivoglia destinazione. Le superfici (o aree) sono quantificate in X2, dove X rappresenta l'unità di misura convenzionalmente utilizzata (ad esempio mm, cm, m, km o qualunque altra unità di lunghezza).I parametri necessari per il calcolo delle aree delle figure piane sono le lunghezza dei lati, della base, dell'altezza, dell'apotema etc.
La base di una figura piana si indica generalmente con la lettera B, l'altezza con la lettera H, il lato con la lettera L (elle) e questi sono i simboli che, nelle formule, si riferiscono ai valori da utilizzare, quando noti. L'area è indicata dalla lettera A.
Formule per il calcolo delle aree delle principali figure piane
- Quadrato:

- Rettangolo:

- Triangolo:

- Trapezio:
 (dove b rappresenta la base minore)
(dove b rappresenta la base minore) - Rombo e romboide:

- Poligono regolare:
 dove P è il perimetro e a
l'apotema
dove P è il perimetro e a
l'apotema - Cerchio:
 dove r è il raggio
dove r è il raggio
![]()
Guadagnare navigando! Acquisti prodotti e servizi.
Guadagnare acquistando online.
![]()
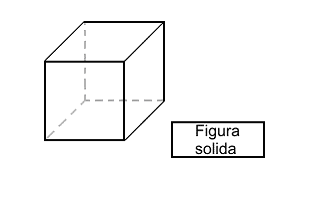
Geometria solida
Viene chiamata geometria solida quella branca della geometria che si interessa dei solidi, ovvero delle figure geometriche formate da punti tutti compresi in uno spazio R³.Tale spazio, che è detto volumetrico, è caratterizzato da tre diverse dimensioni, ovvero dall'incrocio di tre assi tra loro perpendicolari: l'asse x , l'asse y e l'asse z ; è proprio la presenza di quest'ultimo asse che lo differenzia dallo spazio planare, provvisto di sole due dimensioni e generalmente detto cartesiano. Il punto in cui i suddetti tre assi si incrociano è chiamato origine, e viene indicato con una O maiuscola. Dei tre assi, l' x è la larghezza, l' y l'altezza e lo z la profondità.
I solidi
I solidi, che come già detto sono le figure di cui la geometria solida si occupa, posseggono diversi elementi che le figure piane non hanno:- Il volume
- Le facce
- Gli spigoli
- I vertici
- Gli angoli diedri
Il volume è tutto lo spazio interno del poliedro (ovvero, la figura solida). Esso, al contrario dell'area, si articola in tre dimensioni.
La faccia è, per quanto riguarda un poliedro, ciascuna delle forme geometriche o poligoni che ne delimitano il volume. Le aree di tutte le facce del poliedro, se sommate, danno l'area superficiale del solido.
Lo spigolo è il segmento d'intersezione tra due facce poligonali.
Il vertice è in geometria quel punto in cui almeno tre facce di un poliedro convergono. Esso è dunque formato dall'intersezione di tre o più diversi spigoli.
L'angolo diedro è, come si intuisce dal nome, l'angolo tridimensionale formato da due facce e dallo spigolo compreso tra esse.
I poliedri sono divisibili in poliedri irregolari, prismi e piramidi. Mentre le varie componenti dei primi sembrano non seguire alcuna particolare regola di composizione, i secondi sono sempre formati da due figure piane che fanno da basi (regolari o irregolari, ma in ogni caso tra loro uguali) e un numero di rettangoli pari al numero di lati delle figure di base. Le piramidi, invece, sono formate da una figura piana che fa da base (come prima, regolare o irregolare) e da un numero di triangoli pari al numero dei lati della base; tutti i suddetti triangoli hanno un vertice in comune.
I solidi di rotazione
Oltre che ai poliedri, la geometria solida si interessa anche ai cosiddetti solidi di rotazione, ovvero a quelle figure geometriche tridimensionali provviste di almeno una faccia curva. Questi solidi sono chiamati "di rotazione" perchè derivano dalla rotazione di diverse figure geometriche piane, come parabole, cerchi, rettangoli, triangoli ed altre ancora. Tra i solidi di rotazione più importanti ricordiamo la sfera (dal cerchio), il cilindro (dal rettangolo o dal quadrato) ed il cono (dal triangolo).Geometri analitica
La geometria analitica, chiamata anche geometria cartesiana, è lo studio della geometria applicando i principi dell'algebra. Generalmente il sistema di coordinate cartesiane è utilizzato per elaborare equazioni per piani, linee, curve e circonferenze in spazi a due o tre dimensioni. Alcune considerazioni che introducono la geometria analitica sono le basi della moderna matematica.La geometria analitica può essere spiegata molto semplicemente: essa riguarda l'analisi di forme geometriche per via numerica e l'estrazione di informazioni da questa rappresentazione. Numericamente si può ricavare o un vettore oppura una forma geometrica.
René Descartes introdusse le basi della geometria analitica nel 1637 in una appendice chiamata "Geometria" nel suo libro Discorso sul metodo. Questo lavoro scritto in francese e i suoi principi filosofici, fornirono le fondamenta per il calcolo differenziale, che sarà successivamente introdotto da Isaac Newton e Gottfried Wilhelm Leibniz, in maniera autonoma fra loro.
I temi più importanti della geometria analitica sono:
- lo spazio vettoriale
- definizione di piano
- problemi sulla distanza
- il prodotto scalare per ottenere la proiezione fra due vettori
- il prodotto vettoriale per ricavare un vettore perpendicolare a due vettori conosciuti
- problemi di intersezione
GRADO
In matematica il termine grado viene impiegato in due casi:- Per indicare il grado sessagesimale, che è un'unità di misura delle ampiezze di angolo o di arco. La misura degli angoli e degli archi in gradi corrisponde al più antico dei modi per dividere una circonferenza. Consiste nell'utilizzare come unità di misura la trecentosessantesima parte di una circonferenza e l'ampiezza angolare corrispondente: questa ampiezza è detta 1 grado, e si scrive 1°.
- A proposito di un'espressione algebrica. Il grado di un polinomio in una variabille è la massima fra le potenze di questa.
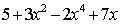 polinomio di quarto grado in x perché la più alta potenza della
variabile x è 4.
polinomio di quarto grado in x perché la più alta potenza della
variabile x è 4.Il grado di un polinomio in più variabili si ottiene individuando il numero di fattori di primo grado, esclusi i coefficienti, di ciascun monomio (cioè trovando il grado di ciascun monomio) e prendendo il più grande tra questi numeri.
Es.  è di terzo grado in x, di
quarto in y, ma di quinto grado in x e y,
poiché il monomio
è di terzo grado in x, di
quarto in y, ma di quinto grado in x e y,
poiché il monomio  è il prodotto di 5 fattori di primo grado.
è il prodotto di 5 fattori di primo grado.
GRANDEZZA
In geometria, si ha a che fare con le grandezze lunghezze, aree, volumi, associate rispettivamente a parti finite di una linea, di una superficie, di un solido; si ha a che fare anche con ampiezze (angolari), associate ad angoli piani.Una grandezza non è una figura, ma può essere rappresentata da una figura, scelta ad arbitrio tra le infinite figure che hanno tutte quelle grandezze.
Una grandezza non è un numero, ma ha per misura un numero, che la esprime una volta che si sia scelta un'unità di misura: si tratta di un numero-di.
Operazioni sulle grandezze
Le grandezze sono tali in quanto si opera su di esse, cioè:- Esiste la somma di due grandezze della stessa specie (due lunghezze, due aree, ...);
- Si può stabilire come si confrontano due grandezze delle stessa specie, cioè si può dire quale delle due è maggiore e quale minore.
GRUPPO
In matematica, un gruppo è una struttura algebrica formata da un insieme con un'operazione binaria (come la somma o il prodotto) che soddisfa alcuni assiomi descritti sotto. Ad esempio, l'insieme dei numeri interi con la somma è un gruppo. Il ramo della matematica che studia i gruppi si chiama teoria dei gruppi.La struttura di gruppo è forse la più importante fra quelle definite in matematica; viene sovente arricchita aggiungendo assiomi o altre operazioni: in questo modo si ottengono le strutture di anello, di campo (ad esempio i numeri razionali, reali e complessi), di spazio vettoriale.
Tra gli innumerevoli esempi di gruppi troviamo anche insiemi di matrici, di permutazioni, di simmetrie di un dato oggetto geometrico.
Definizione
Un gruppo è un insieme G munito di una operazione binaria, chiamata prodotto, che ad ogni coppia di elementi a, b di G associa un elemento, che indichiamo con a * b, rispettando i seguenti assiomi:G1) - proprietà associativa: dati a,b,c appartenenti a G, vale (a * b) * c = a * (b * c).
G2) - esistenza dell'elemento neutro: esiste in G un (unico) elemento neutro rispetto al prodotto, cioè tale che a * e = e * a = a per ogni a appartenente a G.
G3) - esistenza dell'inverso: ad ogni elemento a di G è associato un elemento b, detto inverso di a , tale che a * b = b * a = e.
Un gruppo si chiama commutativo (o abeliano) se vale anche a * b = b * a per ogni coppia a, b di elementi di G.
La cardinalità dell'insieme G viene indicata con |G| ed è chiamata ordine del gruppo: se questa è finita allora G è un gruppo finito, altrimenti è infinito.
Un gruppo abeliano: gli interi con la somma
I numeri interi Z = {..., -4, -3, -2, -1, 0, 1, 2, 3, 4, ...}, con l'operazione di somma "+" formano un gruppo.Dimostrazione:
G1) (proprietà associativa) Se a, b e c sono interi, allora (a + b) + c = a + (b + c)
G2) (elemento neutro) 0 è un intero per cui 0 + a = a + 0 =
a per ogni a
G3) (inverso) Per ogni intero a ne esiste un
altro b := −a, per cui a
+ b = b + a = 0
Questo gruppo è anche abeliano: a + b = b + a. Gli interi considerati sia con la somma che con il prodotto formano una struttura più complicata detta anello.
Insistiamo sul fatto che la struttura di gruppo consiste di due oggetti: un insieme (gli interi) e una operazione (la somma). Per identificare bene il gruppo scriviamo quindi (Z,+).
Un oggetto che non è un gruppo: gli interi con la moltiplicazione
D'altra parte, se consideriamo gli interi con l'operazione prodotto (Z,·), non otteniamo un gruppo:G1) (proprietà associativa) Se a, b e c sono interi, allora (a · b) · c = a · (b · c)
G2) (elemento neutro) 1 è un intero per cui a, 1 · a = a · 1 = a per ogni a
G3) (inverso) Questo assioma non è soddisfatto: non è vero che per ogni intero a ne esiste un altro b per cui ab = ba = 1. Ad esempio, se a = 2 l'inverso b dovrebbe essere 1/2, ma 1/2 non è un intero!
Gli interi con il prodotto formano un monoide commutativo.
Alcuni esempi
- i numeri razionali, reali o complessi con la somma sono gruppi abeliani
- i numeri razionali senza lo zero con il prodotto sono un gruppo abeliano (si deve togliere lo zero per garantire che ogni numero abbia un inverso)
- le funzioni biiettive da un insieme A in sé (ovvero le permutazioni di A) formano un gruppo con l'operazione di composizione di funzioni
- lo spazio vettoriale Rn di dimensione n con la somma è un gruppo abeliano
- l'insieme delle matrici con m righe e n colonne con la somma sono un gruppo abeliano
- l'insieme delle matrici quadrate invertibili con il prodotto è un gruppo non commutativo
- l'insieme delle matrici quadrate ortogonali con il prodotto è un gruppo non commutativo, detto gruppo ortogonale
- l'insieme delle simmetrie di un poligono regolare è un gruppo finito non commutativo, detto gruppo diedrale
- l'insieme delle simmetrie di un solido, ad esempio il cubo o l'ottaedro, è un gruppo finito
- le mosse che possono essere fatte con il cubo di Rubik formano un gruppo
- i numeri naturali con la somma: manca l'inverso
- le matrici quadrate con il prodotto: se non sono invertibili, manca l'inverso
La teoria dei gruppi è la branca della matematica che si occupa dello studio dei gruppi. In astratto, e in breve, un gruppo è una struttura algebrica caratterizzata da una operazione binaria associativa, dotata di unità e per la quale ogni elemento della struttura possiede elemento inverso.
Tipico esempio di gruppo è fornito dalle rotazioni di uno spazio vettoriale euclideo S, cioè dall'insieme costituito da tutte le rotazioni di S (trasformazioni che lasciano fissa l'origine di S, mantengono le distanze tra i punti di S e si possono ottenere con movimenti continui). Muniamo l'insieme delle rotazioni di S con l'operazione di composizione delle rotazioni; si osserva che componendo due di queste rotazioni si ottiene un'altra rotazione; inoltre la rotazione identità, cioè la trasformazione che lascia fisso ogni punto di S, svolge il ruolo di elemento neutro per la composizione delle rotazioni. Le rotazioni di S e la loro composizione costituiscono quindi un gruppo detto gruppo delle rotazioni di S; lo denotiamo con GrpRot(S).
Restringiamo poi l'insieme delle rotazioni di S a quelle che trasformano in se stessa una certa figura geometrica F, ad esempio un cubo, un prisma regolare o una piramide. È evidente che la composizione di due di queste rotazioni fornisce un'altra rotazione che lascia invariata la figura F. Con ciascuna di queste richieste di invarianza si individua un gruppo contenuto in GrpRot(S). Questi gruppi sono detti sottogruppi di GrpRot(S). Questi esempi possono servire a farsi una prima idea del fatto che la teoria dei gruppi è lo strumento matematico per lo studio delle simmetrie delle figure geometriche e di altri oggetti che si incontrano nella matematica, nella fisica e nelle altre discipline che si avvalgono di modelli matematici e di procedure computazionali.
![]()
![]()
Enciclopedia termini lemmi con iniziale a b c d e f g h i j k l m n o p q r s t u v w x y z
Storia Antica dizionario lemmi a b c d e f g h i j k l m n o p q r s t u v w x y z
Dizionario di Storia Moderna e Contemporanea a b c d e f g h i j k l m n o p q r s t u v w y z
Lemmi Storia Antica Lemmi Storia Moderna e Contemporanea
Dizionario Egizio Dizionario di storia antica e medievale Prima Seconda Terza Parte
Storia Antica e Medievale Storia Moderna e Contemporanea
Dizionario di matematica iniziale: a b c d e f g i k l m n o p q r s t u v z
Dizionario faunistico df1 df2 df3 df4 df5 df6 df7 df8 df9
Dizionario di botanica a b c d e f g h i l m n o p q r s t u v z
![]()
